
Система управления для успокоителя качки «СКАТ-1031»

Система управления для успокоителя качки «СКАТ-1031»
Система предназначена для управления рулевыми устройствами бортовых рулей судна, поддержания заданных амплитуды (величины) и частоты (периода) бортовой качки движущегося судна путем изменения угла поворота пера руля в плоскости мидель-шпангоута судна.
Система РУ обеспечивает работу в двух режимах:
-Режим успокоения качки (при скорости судна до 12 узлов);
-Режим раскачивания судна (при скорости судна в диапазоне от 5 до 10 узлов).
Бортовые управляемые рули, расположены побортно с внешней стороны корпуса судна и создают вращающий момент, противодействующий бортовой качке судна или создающей её в зависимости от выбранного режима. Общее количество РУ – 2 шт. (по одному на борт).
- Параметры питающей сети
Система получает питание от судового электроснабжения (трехфазная электрическая сеть 400 В). Отклонения от номинальных значений питающей сети приведены в таблице ниже:
|
Параметр |
Отклонение от номинальных значений, % |
Продолжительность кратковременного отклонения, с |
|
|
Длительное |
Кратковременное |
||
|
Напряжение переменного тока |
+6 -10 |
+20 -30 |
1,5 1,5 |
|
Частота |
±5 |
±10 |
5 |
Потребляемая мощность на собственные нужды системы не превышает 2000 Вт (при напряжении сети 400 В).
- Степень защиты оборудования системы - IP44.
- Связь «СКАТ-1031» с внешними системами управления обеспечивается следующими сигналами:
|
|
Аналоговые сигналы |
Дискретные сигналы |
Цифровая связь |
|
Входы |
От 4 до 20 мА (сопротивление не более 200 ОМ) |
24В «сухой контакт» |
Modbus TCP/IP |
|
Выходы |
От 4 до 20мА (нагрузка не более 500 Ом) |
24В «сухой контакт» (релейные выходы не более 0,5 А) |
Основные параметры, обеспечивающиеся СУ «СКАТ-1031»
- В части обеспечения функционала:
- режим раскачивания судна;
- режим успокоения качки;
- непрерывная связь с внешними судовыми системами;
- В части обеспечения индикации и АПС (аварийно-предупредительной сигнализации)
- устройства защитного отключения;
- контроль наличия питания;
- контроль напряжения сети;
- контроль обрыва фазы;
- защита от токов КЗ;
- контроль параметров и защита электродвигателей насосов;
- контроль параметров датчиков гидросистемы;
- бесперебойное питание СУ от ББП;
- регистрация неисправностей РУ и СУ, запись в энергонезависимый журнал аварий и предупреждений;
- выдача сигнализации о неисправностях РУ и СУ на местные и дистанционные посты управления;
- квитирование аварии;
- аварийный останов.
- В части обеспечения управления:
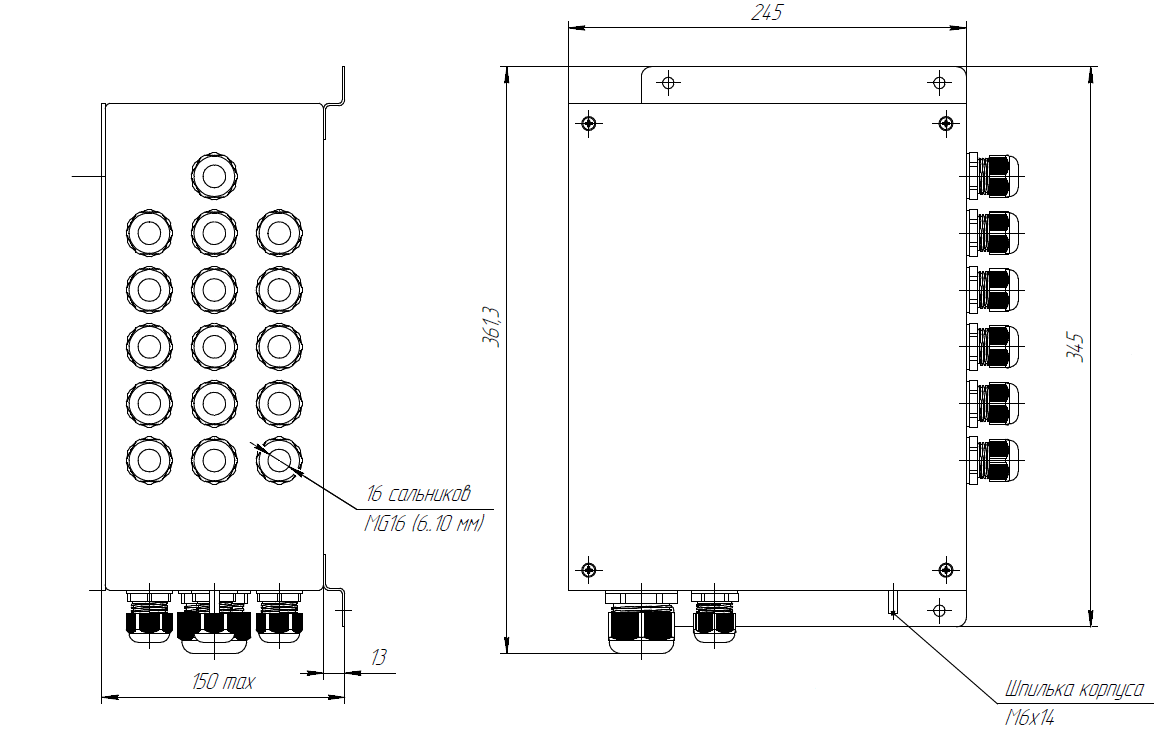
- местное управление (с кнопок на лицевой панели ПДН и тачскрина ПМУ);
- дистанционное управление оборудованием (с тачскрина ПУС и внешних судовых СУ);
- аварийный останов с любого поста управления
- приоритетность управления - с местного поста управления;
Структурная схема системы управления «СКАТ-1031»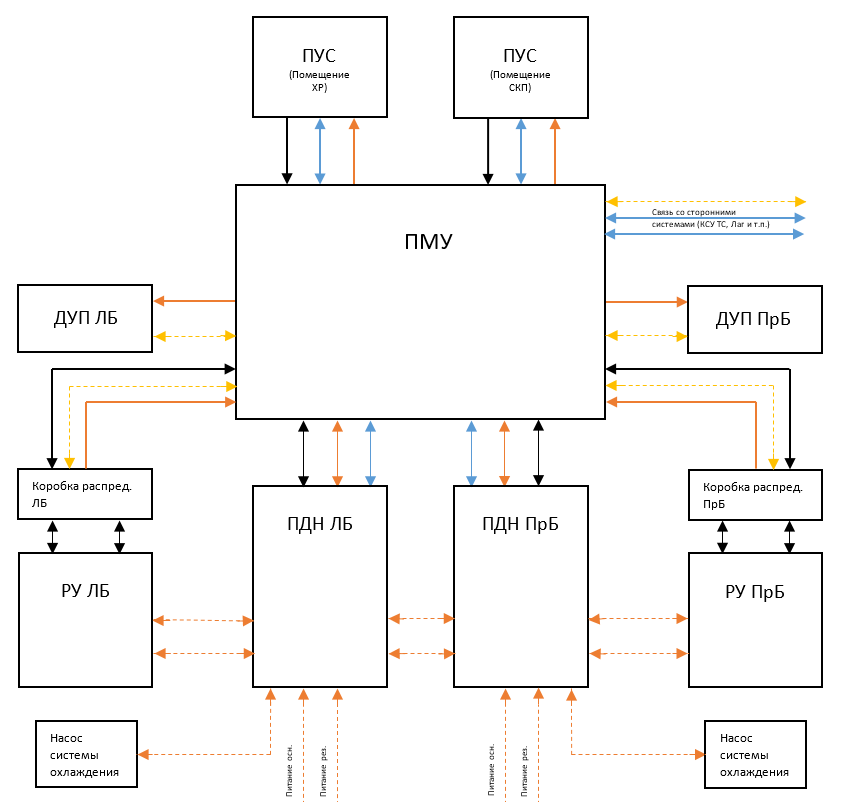
Где указаны:
1. Блоки:
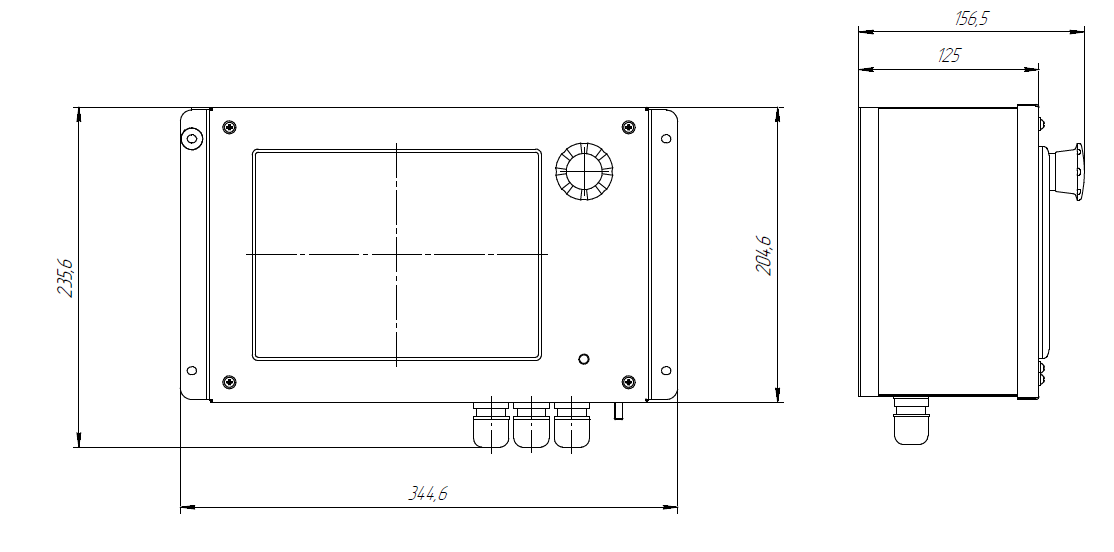
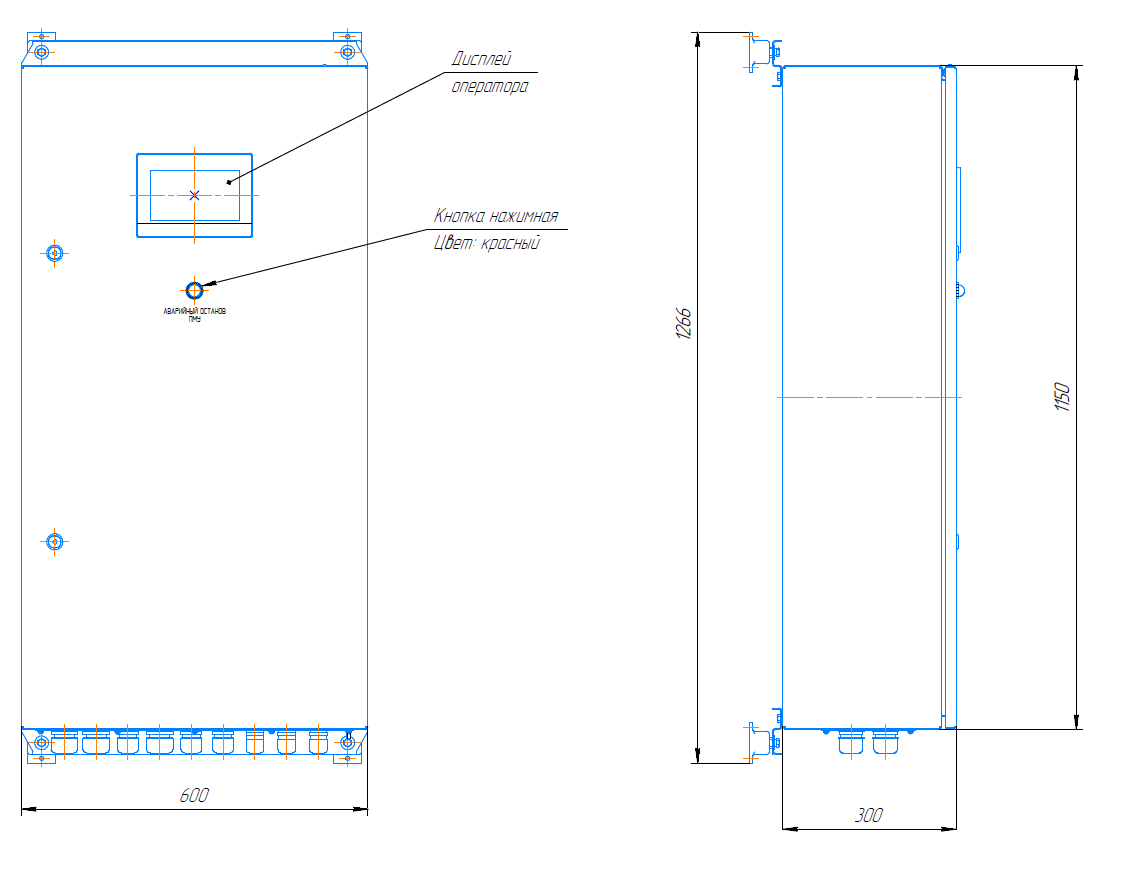
ПМУ – Прибор местного управления
ПУС – Панель управления и сигнализации
ДУП ЛБ/ПрБ - Датчик угла поворота левого борта/правого борта
ПДН ЛБ/ПрБ – Пускатель двигателя насоса левого борта/правого борта
РУ ЛБ/ПрБ – Раскачивающее устройство левого борта/правого борта
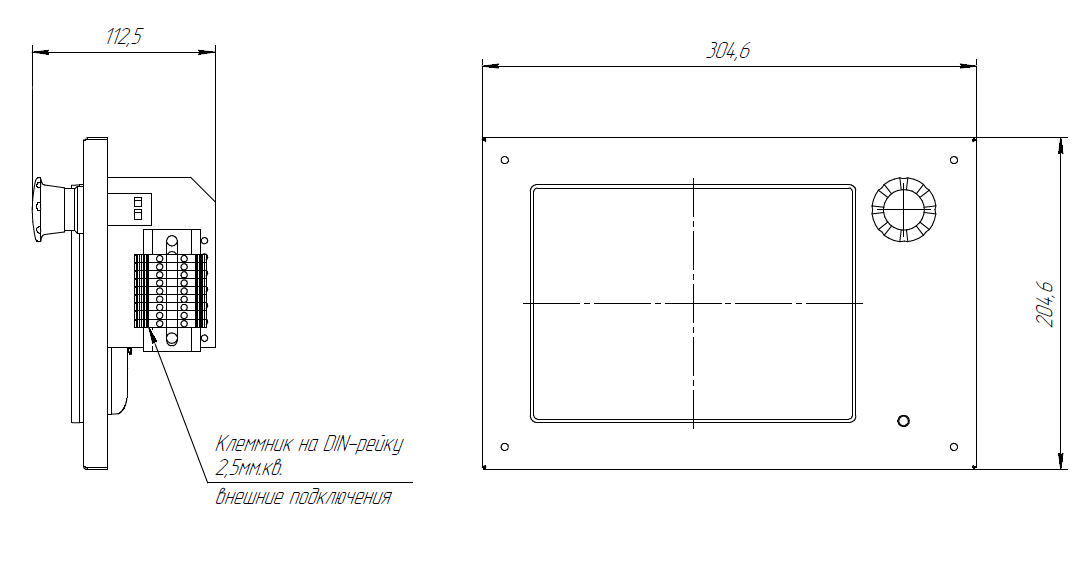
КР ЛБ/КР ПрБ – коробка распределительная левого борта/правого борта
2. Связи:
Оранжевая сплошная линия – питание 24В;
Оранжевая пунктирная линия – питание 380В;
Чёрная линия – беспотенциальные сухие контакты и аналоговые сигналы;
Голубая линия – Ethernet;
Жёлтая пунктирная линия – RS-422/485.